Den första mjuka robothanden är 3D-printad: den har ben, senor och ligament
Kommer du ihåg den tidlösa och ikoniska "Hand" i Familjen Addams? Detta nya vetenskapsprojekt påminner lite om den, men i en robotversion: i den här artikeln vill vi presentera det och berätta om dess speciella egenskaper. Låt oss lära känna den tillsammans.
3D-printad mjuk robothand: den har ben, senor och ligament
Nature
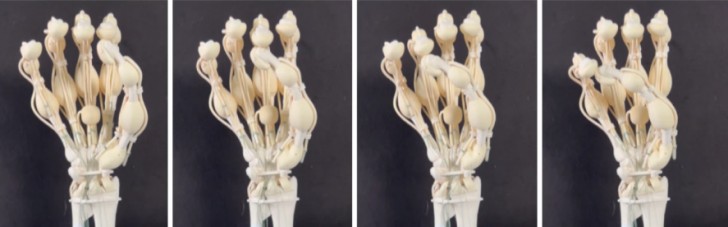
Tekniken, tillsammans med artificiell intelligens, övervinner utmaningar och barriärer med en alltmer futuristisk smak: robothanden som är skapad av forskare vid ETH i Zürich, Schweiz, tillsammans med startupen Inkbit 3D, USA, inkluderas också i denna avantgardsektor. Samarbetet har gett upphov till 3D-utskrifter av aldrig tidigare skådade robotar: handen som verkar mjuk vid beröring, är i själva verket utrustad med konstgjorda ligament, ben och senor. För att skapa den användes olika elastiska och styva polymerer och en innovativ laserskanningsteknik. Genom att lyckas anpassa 3D-utskrift till långsamhärdande polymer har forskare lyckats öppna många fler dörrar för mjuk robotiks olika möjligheter.
3D-utskrift tar gigantiska steg framåt (tänk bara på NASA:s projekt angående de första stabila hemmen på månen till 2040), vilket har flyttat gränserna för snabbt härdat plast, och gör det möjligt att arbeta med mer elastiska, men också motståndskraftiga material. Tack vare denna nya teknik kunde Zürich-teamet skriva ut en robothand med liknande egenskaper för första gången någonsin.
Thomas Buchner, huvudförfattare till studien, säger: "Vi använder nu långsamt härdande tiolenpolymerer. Dessa har väldigt bra elastiska egenskaper och de återgår till sitt ursprungliga tillstånd mycket snabbare efter böjning än polyakrylater.".
Det är just dessa material som möjliggör skapandet av handens rörliga ligament.
3D-printad mjuk robothand: den innovativa laserskannern

Nature
Robert K. Katzschmann, professor i robotik vid ETH, förklarade: "Robotar gjorda av mjukt material, som den hand vi har utvecklat, har fördelar jämfört med konventionella robotar gjorda av metall. Eftersom de är mjuka är det mindre risk för skador när de arbetar med människor och är bättre lämpade att hantera ömtåliga varor.".
För att skapa robothanden, som printades lager för lager, berikade forskarna 3D-utskriften med en laserskanner som omedelbart kontrollerade varje utskrivet lager för att upptäcka eventuella ojämnheter på ytan.
Wojciech Matusik, professor vid Massachusetts institute of Technology, en av författarna till studien, förklarade: "En återkopplingsmekanism kompenserar för dessa oegentligheter under utskriften av nästa lager genom att beräkna eventuella nödvändiga justeringar av mängden material som skrivs ut i realtid och med millimeterprecision.".
Därför korrigeras eller jämnas inte ojämna lager ut, utan efterföljande lager skrivs ut på ett sätt som är lämplig för att kompensera.
De nya gränserna för mjuk robotutskrift
Nature
Efter att Katzschmanns team hade skapat handen ville de fördjupa sig i produktionen av ännu mer komplexa strukturer, medan de nya skrivarna kommer att säljas av Inkbit 3D till sina kunder. Tekniken kan vara jämförbar med den för bläckstråleskrivare: istället för färgat bläck levererar den dock hartser som härdas av UV-ljus, vilket gör flerskiktiga 3D-objekt snarare än enstaka ark. Dessutom kan den skriva ut i en anmärkningvärd hög upplösning med voxlar, 3D-motsvarigheten till klassiska pixlar, bara några mikrometer i diameter.
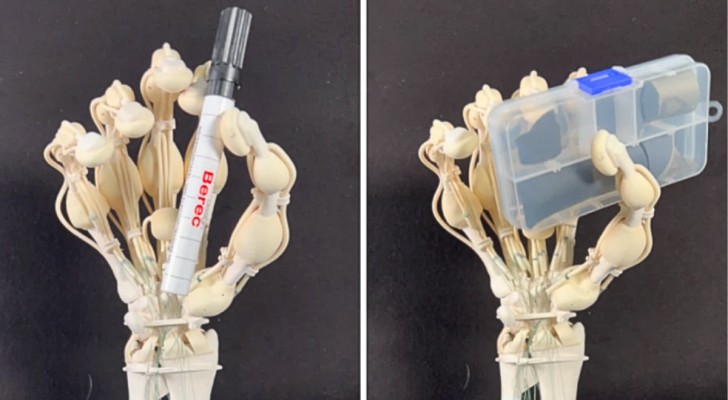
Inkbit hade letat efter en effektiv lösning i flera år och uppenbarligen hittat den med denna geniala teknik. Alla fingertoppar på handen har också ett tunt membran med en liten hålighet på baksidan ansluten till ett gjutet rör och förlängt in i fingrets struktur. På detta sätt, när fingrarna rör vid ett föremål komprimeras hålrummet, vilket ökar det inre trycket i röret. En trycksensor i slutet upptäcker processen och stoppar griprörelsen på föremålet, såsom pennan och vattenflaskan som forskarna använder.
"Faktum är att vi nu kan skapa en struktur eller en robot i ett svep. Det kanske behövs lägga till en motor här eller där, men strukturens komplexitet finns där.".
Efter handen öppnar sig nya gränser för robotexperiment. Teamet skapade också en sexbent robot som kan röra sig fram och tillbaka och med en pump som simulerar en hjärtmuskel. Den kan till och med öppna en ask med Tic-Tac. En exceptionell vändpunkt som lovar fantastiska resultat inom en snar framtid.
- https://www.nature.com/articles/s41586-023-06684-3?utm_medium=affiliate&utm_source=commission_junction&utm_campaign=CONR_PF018_ECOM_GL_PHSS_ALWYS_DEEPLINK&utm_content=textlink&utm_term=PID100060515&CJEVENT=e9fedbfa848f11ee815d22080a18ba72#Sec5
- https://ethz.ch/en.html
- https://www.youtube.com/@ethzurich
- https://inkbit3d.com/